
NEXLEVEL kicks-off our Partner Spotlight series! NEXLEVEL Automation is the premier Manufacturers Representative Team focused on delivering superior motion control and robotic solutions.
Motus Blog
TRENDS: 2021 & Beyond
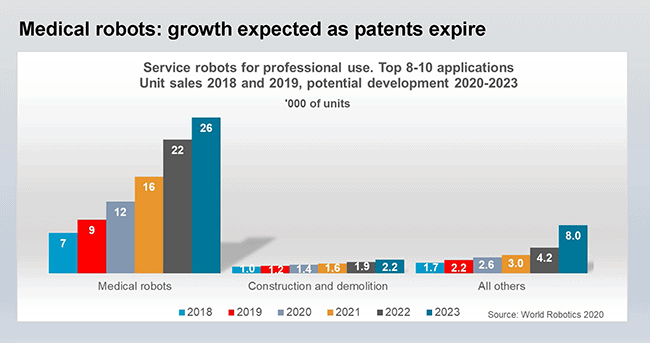
We wanted to share an article, recently posted from RIA, Robotics Industries Association. It provides an excellent overview of 2021 and beyond for robotics and automation in various industry sectors, and how the pandemic helped to put robotics and automation in the forefront.
Torque Density Impacts Robot Speed

Humans know intuitively or from experience that if we put weights on our wrists or elbows, it becomes more difficult to move our arms. If we apply the same force we used without any weights, our arm will move more slowly.
It’s no surprise, then, that we see the same result in robots: as joints get heavier, the arm moves more slowly when the same force (or torque) is applied. Conversely, removing weight from the wrist or elbow actuator using a lighter weight transmission/gear drive results in higher speeds for the same applied torque.
What does a 10-15% increase in robot speed imply for robot owners?
Torque Density and Robot Reach

As we mentioned in the last post, we will be looking at how torque density influences different robot parameters, including reach, speed, and lifetime. Each of these in turn has a direct and important impact on the economic value of a robot to the end-user.
The Importance of Torque Density for Robot Performance

In the context of robotic actuators, the term torque density refers to how much torque the actuator is able to produce per unit weight or unit volume. The term can be applied to the actuator as a whole or separately to the motor or gearbox that is contained within the actuator. Why should we be interested in torque density? Because the torque densities of a robot’s components can limit nearly every facet of a robot’s performance.
Motus Labs Secures $1.5M in Seed Funding
Motus Labs LLC, a manufacturer of robot joint actuator and drives for the Service and Industrial robot markets, has successfully closed a self-funded seed round of $1.5 million.
Motus Labs Welcomes Dr. Mark Spong & Dr. Jeffrey Smith as Founding Investors and Advisors

Motus Labs, LLC a manufacturer of robotic drives, is excited to announce the addition of two highly regarded robotic engineers and professors from the University of Texas at Dallas and the University of Texas at Arlington. The Company is honored to have the advisors as part of the Motus founding team and as investors.
