
As we mentioned in the last post, we will be looking at how torque density influences different robot parameters, including reach, speed, and lifetime. Each of these in turn has a direct and important impact on the economic value of a robot to the end-user.
In considering reach, let’s look at the very simple example shown in Figure 1. Mass M represents the combined mass of two wrist actuators at joints J2 and J3; l is the length of the link connected to the wrist actuators; m is the mass of the link, which we assume to be uniformly distributed.
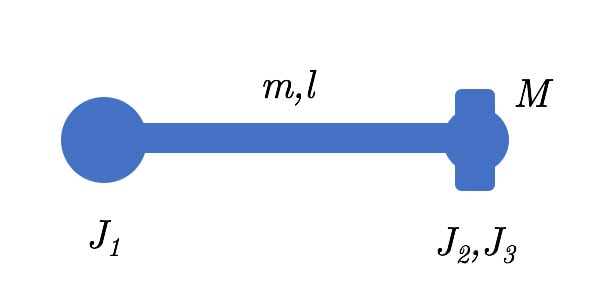
If we consider just the forces required to hold the arm vertical, J1 must supply a torque:
T = 1/2 mgl + Mgl
If rewrite this in terms of l we can see directly how the wrist actuator masses can impact the allowed link length, l, if we keep J1 torque T fixed:
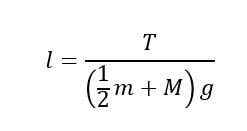
As an example, let’s start by assuming that the link weighs 10 kg, that it is 50 cm long, and that each wrist actuator weighs 3 kg. This would require a torque of about 54 Nm to keep the arm level.
Let’s assume now that we are able to increase the torque density of the wrist actuators by a factor of two – meaning that their masses decrease by half. Using the second equation, we find that the arm length can increase up to 68 cm – nearly 40% longer. Longer reach means that the robot work cell can be larger, potentially reducing the number of robots required to service a given user facility.
In the example above, we are considered a quasi-static scenario where the robot arm is simply being held in place against the force of gravity. We also looked only at the impact on a single joint preceding the wrist. In the next post we will be looking at a more complex arm and examine the impact of actuator torque density on robot speed.
